
AskSia

Question
Computer Science
Posted about 2 years ago
Question 2
Given the initial state and the goal state of the following five-puzzle problem
2
12
1
3
3
4
5
4
5
(a)
(b)
Five-puzzle problem: (a) initial state; (b) goal state
node:a
2
h(a)=3
1
3
f(a)=3
54
do
ri
node:b
12
node:c
2
h(b)=2
h(c)=4
3
1
3
f(b)=3
f(c)=5
5
4
5
4
do
ri
do
node:d
node:e
node:f
12
12
23
b(d)=3
h(e)=1
h(f)=4
3
5
3
1
f(d)=5
f(e)=3
f(f)=6
54
4
54
ri
do
le
up
do
1
2
1
12
23
23
53
3
2
34
1
14
4
54
5
54
5
node:h
node:g
node:i
node:j
node:k
h(g)=3
b(h)=2
h(i)=0
h(j)=4
h(k)=3
f(g)=6
f(h)=5
f(i)=3
f(j)=7
f(k)=6
a. Using the tree, find the goal state by conducting:
1. a blind breadth-first search strategy.
2. a depth-first search strategy
3. iterative deepening search with initial k=0 and incremented by 1
4. Greedy search with h(n) = the number of misplaced tiles.
5. A* search with f(n)=g(n)+h(n); g(n) is the tree level and h(n) is the number of
misplaced tiles.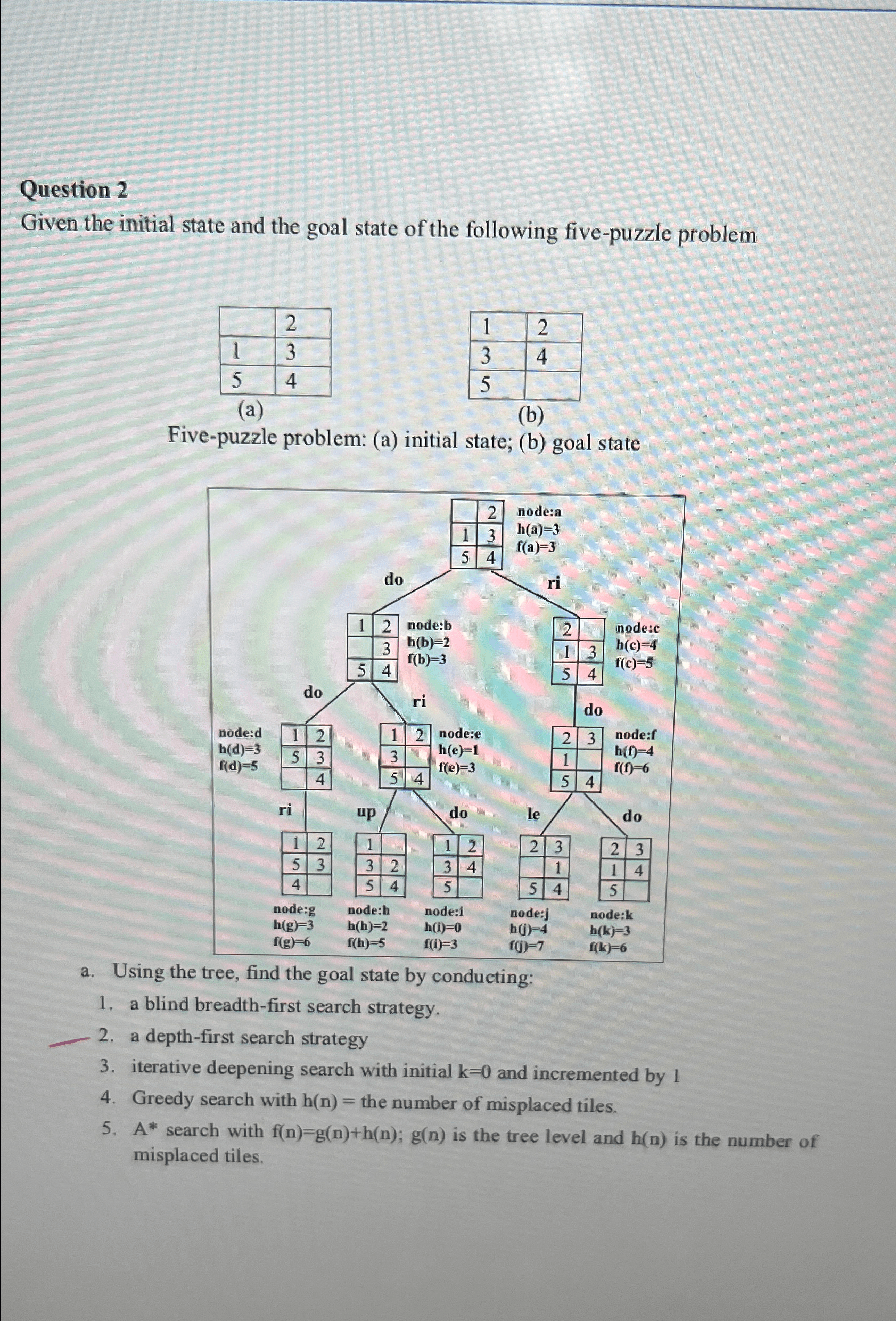
 Sign in to unlock the answer
Sign in to unlock the answer
Answer from Sia
Posted about 2 years ago
Sure, let's address each search strategy one by one for the five-puzzle problem.
1. Blind Breadth-First Search Strategy
Breadth-First Search (BFS) explores all nodes at the present depth level before moving on to nodes at the next depth level. In this case, we start from the initial state and explore all possible moves level by level until we find the goal state.
From the tree diagram:
- Start at node "a".
- Explore nodes "b" and "c".
- From "b", explore nodes "d" and "e".
- From "c", explore node "f".
- Continue this process until the goal state is found.
The goal state is found at node "i".
i
Key Concept
Breadth-First Search (BFS)
Explanation
BFS explores all nodes at the current depth before moving to the next level, ensuring the shortest path in an unweighted graph.
2. Depth-First Search Strategy
Depth-First Search (DFS) explores as far as possible along each branch before backtracking. In this case, we start from the initial state and explore each branch deeply before moving to the next branch.
From the tree diagram:
- Start at node "a".
- Explore node "b", then "d", then "h".
- Backtrack to "d", then explore "e".
- Backtrack to "b", then explore "c", then "f".
- Continue this process until the goal state is found.
The goal state is found at node "i".
i
Key Concept
Depth-First Search (DFS)
Explanation
DFS explores as far down a branch as possible before backtracking, which can be more memory efficient but may not find the shortest path.
3. Iterative Deepening Search with Initial k=0 and Incremented by 1
Iterative Deepening Search (IDS) combines the benefits of BFS and DFS by performing a series of depth-limited searches with increasing depth limits.
From the tree diagram:
- Start with depth limit "k=0", explore node "a".
- Increase depth limit to "k=1", explore nodes "b" and "c".
- Increase depth limit to "k=2", explore nodes "d", "e", and "f".
- Continue this process until the goal state is found.
The goal state is found at node "i".
i
Key Concept
Iterative Deepening Search (IDS)
Explanation
IDS performs depth-limited searches with increasing depth limits, combining the space efficiency of DFS with the completeness of BFS.
4. Greedy Search with h(n) = the Number of Misplaced Tiles
Greedy search uses a heuristic to guide the search, selecting the node that appears to be closest to the goal state based on the heuristic.
From the tree diagram:
- Start at node "a" with "h(a)=3".
- Choose node "b" with "h(b)=2".
- Choose node "e" with "h(e)=1".
- Finally, choose node "i" with "h(i)=0".
The goal state is found at node "i".
i
Key Concept
Greedy Search
Explanation
Greedy search uses a heuristic to select the node that appears to be closest to the goal, which can be faster but is not guaranteed to find the optimal path.
5. A* Search with f(n)=g(n)+h(n); g(n) is the Tree Level and h(n) is the Number of Misplaced Tiles
A* search combines the cost to reach the node ("g(n)") and the heuristic estimate of the cost to reach the goal ("h(n)").
From the tree diagram:
- Start at node "a" with "f(a)=3".
- Choose node "b" with "f(b)=3".
- Choose node "e" with "f(e)=3".
- Finally, choose node "i" with "f(i)=3".
The goal state is found at node "i".
i
Key Concept
A* Search
Explanation
A* search combines the actual cost to reach a node and the estimated cost to reach the goal, ensuring both optimality and completeness.
Not the question you are looking for? Ask here!
Enter question by text
Enter question by image

Unlock Smarter Learning with AskSia Super!
Join Super, our all-in-one AI solution that can greatly improve your learning efficiency.
30% higher accuracy than GPT-4o
Entire learning journey support
The most student-friendly features

Study Other Question